
Miten laivalle annetaan näkö ja kuulo?

Maanmittauslaitoksen Paikkatietokeskus (FGI), Aalto-yliopisto ja Fleetrange Oy yhdistivät voimansa tutkimushankkeessa, jolla pyritään parantamaan meriliikenteen alusten tilannetietoisuutta. Tämä parantaa turvallisuutta ja lisää automaatiota merenkulussa. Hankkeen tavoitteena oli, että kohteita, kuten merimerkkejä sekä muita laivan ympäristössä olevia aluksia ja veneitä, voitaisiin havaita ja tunnistaa automaattisesti sekä hankkia parempia tilannetietoja sensorifuusiolla.
Tutkijat yhdistelivät visuaalisista kuvista, ympäristön äänten tallenteista, tutka- ja laserkeilaus-mittauksista, satelliittinavigoinnista ja alusten transpondereista saatuja tietoja. Kokeet tehtiin Tallink-konsernin Megastar-aluksella joulukuussa 2020. Megastariin asennettiin sensoreita, ja data käsiteltiin innovatiivisilla koneoppimis- ja sensorifuusio-ohjelmistoilla.
Tekoäly ja kamera havaitsevat muut laivat ja merimerkit jopa viiden kilometrin etäisyydeltä
Kokeet osoittivat, että kamerakuvien käsitteleminen tekoälyllä voi auttaa havaitsemaan laivoja ja merimerkkejä jopa viiden kilometrin etäisyydeltä.
– Megastarilla tekemämme kokeet osoittivat, että kamerapohjainen laivojen ja merimerkkien havaitseminen ja etäisyyden mittaaminen niihin on tällä hetkellä tehokasta viiteen kilometriin asti. Tulokset ovat jo lupaavia autonomisen navigoinnin kannalta, mutta hienointa tässä on se, että prosessia voidaan myös laajentaa. Koulutustiedon ja koulutuksen lisääntyessä tekoälyalgoritmimme suorituskyky paranee varmasti, sanoo Paikkatietokeskuksen tutkija Toni Hammarberg.
Mikrofonit ja laserkeilaimet voivat auttaa havaitsemaan muut laivat, kun näkyvyys on huono
Mikrofonit auttavat havaitsemaan muut lähistöllä olevat laivat myös heikoissa valo-olosuhteissa. Toisen aluksen torven äänen suunta voidaan arvioida kolmella mikrofonilla. Neljäs mikrofoni auttaa arvioimaan äänenlähteen etäisyyden.
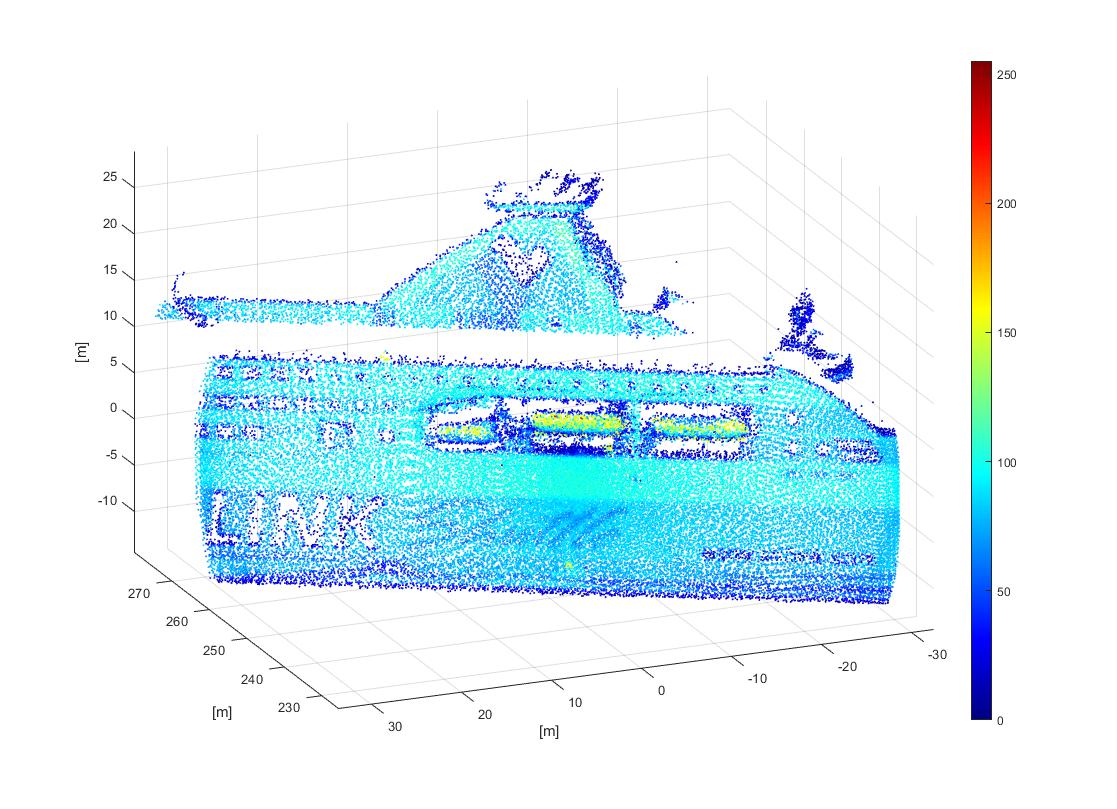
Laserkeilaimet havaitsevat kohteita lähettämällä laserpulsseja niitä kohti ja mittaamalla pulssin kaiun voimakkuuden, suunnan ja lentoajan. Näiden tietojen perusteella keilain rakentaa 3D-pistepilven ympäristöstään.
– Laserkeilaimia on ehdotettu käytettäviksi lyhyen kantaman ja tarkempana tilannetietoisuussensorina, jolla voidaan paikata merenkulkututkien puutteita. Teimme merenkulkuympäristössä toteutettavuustutkimuksia, joissa korostuivat sekä laserkeilainteknologian lupaavat piirteet että haasteet. laserkeilaimien nykyisen sukupolven ilmaisuetäisyys, pulssinopeus ja kulmaerottelukyky ovat yleisesti riittämättömiä. Tämä rajoittaa kohteiden näkyvyyttä yleensä alle yhteen kilometriin. Toisin sanoen laserkeilaimet soveltuvat turvallisuuden parantamiseen satamissa, mutta muutoin niistä ei ole paljon apua merimerkkien tai muiden laivojen havaitsemisessa riittävän ajoissa, sanoo tutkimusryhmäpäällikkö Tuomo Malkamäki Paikkatietokeskuksesta.
Nyt saatavilla olevat laserkeilaimet soveltuvat myös huonosti ankariin meriolosuhteisiin. Näitä ongelmia voidaan ratkaista laserkeilainsovellusten huolellisella optimoinnilla. Tulevaisuudessa tällaisilla laserkeilaimilla varustetut alukset voivat muodostaa huomattavasti paremman tilannekuvan, kun laserkeilaimet tuottavat kohtuullisen tarkan 3D-pistepilven lähiympäristöstä.
– Laserkeilausdata on myös välillisesti hyödyllistä, koska sitä voidaan käyttää muiden sensoreiden tekoälykoulutukseen. Se voi parantaa esimerkiksi lyhyen kantaman kohteiden luokittelua ja varmentamista, Malkamäki jatkaa.
GNSS ja muut sensorit parantavat turvallisuutta yhdessä
GNSS- ja ympäristön havainnointisensorit tekevät yhdessä laivojen liikennöinnistä turvallisempaa ja edullisempaa. Tutkimuksessa yritetään kehittää aluksia, jotka purjehtivat autonomisesti aavalla merellä, navigoivat vaikeakulkuisilla ja ruuhkaisilla rannikkovesillä sekä kiinnittyvät oikeaan laituriin täysin ilman ihmisen toimenpiteitä. Tämä edellyttää oikeaa yhdistelmää sensoreita, jotka pystyvät näkemään ja kuulemaan lähietäisyydellä sekä havaitsemaan muut laivat etäältä.
Tämän teknologian avulla alus pystyy itse tekemään päätöksiä ja muuttamaan reittiään hyvissä ajoin ennen mahdollista törmäystä. Toiveena on, että teknologia auttaa vähentämään huomattavasti laivaonnettomuuksia. Megastarin kaltaiset matkustaja-alukset tuskin tulevat koskaan olemaan täysin autonomisia, mutta niiden miehistöt voivat hyötyä samasta teknologiasta kuin mitä tulevaisuuden autonomisissa laivoissa on.
– Yksi sensori ei riitä koskaan kaikkien turvallisuuden kannalta välttämättömien tietojen antamiseen miehistölle. Miehistöt käyttävät aina useilla laitteilla saatavia päällekkäisiä tietoja, jotta yksittäisen laitteen virheet voidaan helposti tunnistaa ja sulkea pois. Autonomisen navigointijärjestelmän pitäisi toimia samalla periaatteella, toteaa tutkimusryhmäpäällikkö Sarang Thombre Paikkatietokeskuksesta.
Euroopan avaruusjärjestö (ESA) tuki Maritime AI-NAV -tutkimushanketta. ESA:n yleinen tavoite on parantaa eurooppalaista autonomisten kuljetusten osaamista ja tutkia, miten eurooppalainen satelliittivälitteinen paikannus- ja navigointi-infrastruktuuri (esimerkiksi Galileo ja EGNOS) voi auttaa edistämään tieteellistä innovointia ja sen myötä liiketoimintamahdollisuuksia tällä alalla.
Huomaa, että tässä mediatiedotteessa ilmaistut näkemykset ovat hankkeen yhteistyökumppaneiden mielipiteitä, eikä niitä pidä tulkita Euroopan avaruusjärjestön viralliseksi mielipiteeksi.
Avainsanat
Yhteyshenkilöt
Tutkija Toni Hammarberg, 050 409 1507, etunimi.sukunimi@maanmittauslaitos.fi
Tutkimusryhmäpäällikkö Tuomo Malkamäki, 050 353 1887, etunimi.sukunimi@maanmittauslaitos.fi
Kuvat

{kind=link}
{kind=link}

{kind=link}
Tietoja julkaisijasta
 Maanmittauslaitos
MaanmittauslaitosPL 84 (Opastinsilta 12C)
00521 HELSINKI
029 530 1100 (Vaihde)https://www.maanmittauslaitos.fi/
Teemme maanmittaustoimituksia, ylläpidämme kiinteistöjen ja osakehuoneistojen tietoja, huolehdimme omistusoikeuksien rekisteröinneistä ja kiinnityksistä, tuotamme kartta-aineistoja sekä edistämme paikkatietojen tutkimusta.
Tilaa tiedotteet sähköpostiisi
Haluatko tietää asioista ensimmäisten joukossa? Kun tilaat tiedotteemme, saat ne sähköpostiisi välittömästi julkaisuhetkellä. Tilauksen voit halutessasi perua milloin tahansa.
Lue lisää julkaisijalta Maanmittauslaitos
Kiinteistökauppatilastoissa ei näy markkinan piristymistä19.9.2024 08:03:55 EEST | Tiedote
Tammi-elokuun kiinteistökauppojen tilastot osoittavat, että kiinteistökauppa hidastui entisestään yhden prosentin verran edellisvuoden vastaavaan aikaan verrattuna. Omakotitalokaupoissa alueellinen vaihtelu kauppamäärien ja hintatasojen muutoksissa oli suurta. Maanmittauslaitos kokosi tilastoihin kiinteistöjen kauppahinnat ja kauppojen lukumäärät vuoden 2024 alusta elokuun loppuun.
Oravivuoren maailmanperintökohteeseen suunnitellaan virallista ulkoilureittiä17.9.2024 08:28:03 EEST | Tiedote
Puitteet ulkoiluun Korpilahden Oravivuoren maanmittausnähtävyydellä paranevat lähivuosina, jos Jyväskylän kaupunki ja alueen maanomistajat niin sopivat. Maanmittauslaitos on kutsunut koolle 8.9. Jyväskylän kaupungin ja paikalliset maanomistajat harvinaiseen prosessiin, jossa on mahdollista virallistaa polut ja pysäköintialue Oravivuorella sijaitsevalle Unescon maailmanperintökohteelle, Struven kolmiomittausketjun mittauspisteelle.
Jyväskylässä ja Petäjävedellä järjestetään Unescon pohjoismainen maailmanperintökonferenssi– Maanmittauslaitos vastaa maapallon mittanauhan säilymisestä Suomessa30.8.2024 07:06:22 EEST | Tiedote
Unescon konferenssi tuo Keski-Suomeen jopa 130 pohjoismaista Unescon maailmanperintökohteiden edustajaa, koska maailmanperinnön vaaliminen vaatii jatkuvaa työtä.
Karttaekspertin vinkit sienimetsälle: tutki maastoja etukäteen kartalta ja ilmakuvilta29.8.2024 07:17:21 EEST | Tiedote
Herkkutatin löytää nuoresta metsästä, suppilovahveron parhaiten sammaleisilta rinteiltä. Suotuisat sieniapajat eivät jää sattuman varaan, kun niitä etsii suunnitelmallisesti karttojen ja ilmakuvien avulla.
Vesijättö – mitä mökkeilijän olisi hyvä tietää erikoisesta sanasta?16.7.2024 07:24:53 EEST | Tiedote
Järven rannalla kesää viettävällä lomalaisella voi olla kesämökkitontillaan tilanne, jossa henkilö ei omistakaan tontin suosikkikohtaa. Vesijättö on entistä vesialuetta, joka on vuosien saatossa muuttunut maaksi eli rannaksi, kun vesistön pinta on laskenut. Mitä tilanteelle voisi tehdä?
Uutishuoneessa voit lukea tiedotteitamme ja muuta julkaisemaamme materiaalia. Löydät sieltä niin yhteyshenkilöidemme tiedot kuin vapaasti julkaistavissa olevia kuvia ja videoita. Uutishuoneessa voit nähdä myös sosiaalisen median sisältöjä. Kaikki tiedotepalvelussa julkaistu materiaali on vapaasti median käytettävissä.
Tutustu uutishuoneeseemme